Hello everyone,
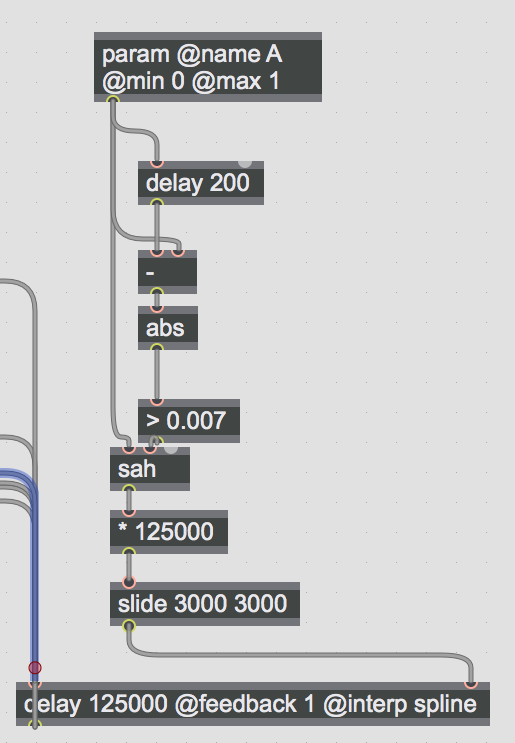
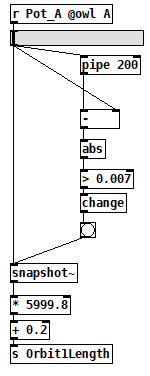
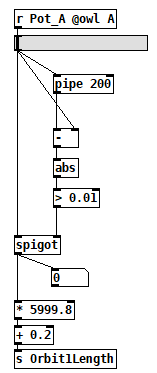
I’ve got a really annoying problem with my OWL Pedal: when I plug (in gen~) any of the 4 knobs to control the delay time of a delay object the sound is wobbly until I set the block size to 2 on the Owl Control. If I disconnect the knob the wobble stops. Of course I set the slide object to smooth the values, but the wobble is also when the knob is fixed in any position. I noticed that if I clip the output of the knob let’s say to 0.2 0.8 the wobbling disappears on both limits (0 - 1) of the knob but suddenly appears again when the value of the clip is reached (0.2 to 0.8). So I think that the problem is about the translation cv signal (or signal at control rate speed, I don’t know how knobs talks to the dsp) to audio rate signal. I’ve got Firmware v14 loaded.
Any suggestion to fix the problem ?
Thanks
P.S: Is it possible to set the block size directly in a gen patch ?